show
Afficher le chemin de référence dans la figure
Description
show( affiche le chemin de référence sur les axes spécifiés. refPath,'Parent',parentAx)parentAx est spécifié comme un handle Axes .
ax = show(___)
Exemples
Générez des trajectoires alternatives pour un chemin de référence à l'aide des coordonnées Frenet. Spécifiez différents états initiaux et terminaux pour vos trajectoires. Ajustez vos états en fonction des trajectoires générées.
Générez un chemin de référence à partir d'un ensemble de waypoints. Créez un objet trajectoryGeneratorFrenet à partir du chemin de référence.
waypoints = [0 0; ... 50 20; ... 100 0; ... 150 10]; refPath = referencePathFrenet(waypoints); connector = trajectoryGeneratorFrenet(refPath);
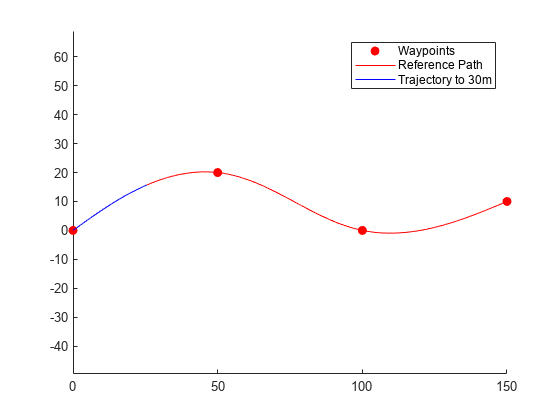
Générez une trajectoire de cinq secondes entre l'origine du chemin et un point situé à 30 m en aval du chemin, comme l'indique Frenet.
initState = [0 0 0 0 0 0]; % [S ds ddS L dL ddL] termState = [30 0 0 0 0 0]; % [S ds ddS L dL ddL] [~,trajGlobal] = connect(connector,initState,termState,5);
Afficher la trajectoire en coordonnées globales.
show(refPath); hold on axis equal plot(trajGlobal.Trajectory(:,1),trajGlobal.Trajectory(:,2),'b') legend(["Waypoints","Reference Path","Trajectory to 30m"])
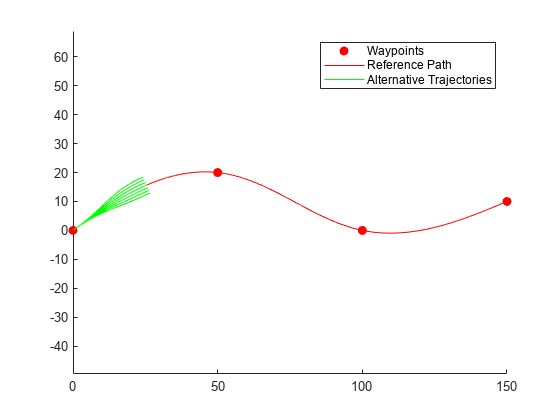
Créez une matrice d'états terminaux avec des écarts latéraux compris entre –3 m et 3 m. Générez des trajectoires qui couvrent la même longueur d'arc en 10 secondes, mais s'écartent latéralement de la trajectoire de référence. Affichez les nouveaux chemins alternatifs.
termStateDeviated = termState + ([-3:3]' * [0 0 0 1 0 0]); [~,trajGlobal] = connect(connector,initState,termStateDeviated,10); clf show(refPath); hold on axis equal for i = 1:length(trajGlobal) plot(trajGlobal(i).Trajectory(:,1),trajGlobal(i).Trajectory(:,2),'g') end legend(["Waypoints","Reference Path","Alternative Trajectories"]) hold off
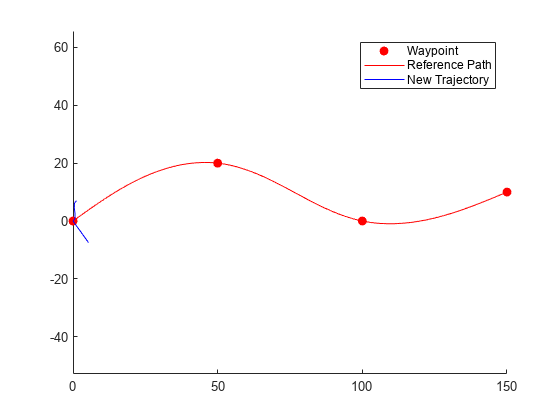
Spécifiez un nouvel état terminal pour générer une nouvelle trajectoire. Cette trajectoire n'est pas souhaitable car elle nécessite un mouvement inverse pour atteindre une vitesse longitudinale de 10 m/s.
newTermState = [5 10 0 5 0 0]; [~,newTrajGlobal] = connect(connector,initState,newTermState,3); clf show(refPath); hold on axis equal plot(newTrajGlobal.Trajectory(:,1),newTrajGlobal.Trajectory(:,2),'b'); legend(["Waypoint","Reference Path","New Trajectory"]) hold off
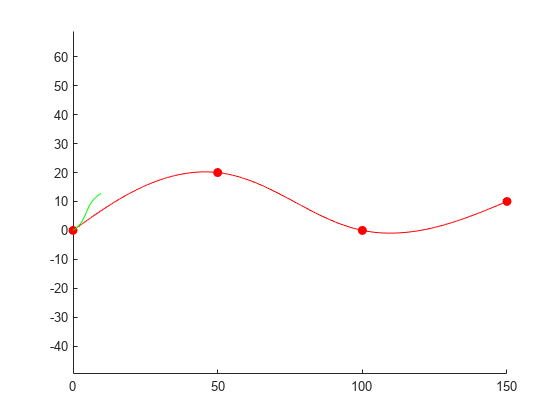
Assouplissez la restriction sur l'état longitudinal en spécifiant une longueur d'arc de NaN. Générez et affichez à nouveau la trajectoire. La nouvelle position montre une bonne trajectoire alternative qui s'écarte de la trajectoire de référence.
relaxedTermState = [NaN 10 0 5 0 0]; [~,trajGlobalRelaxed] = connect(connector,initState,relaxedTermState,3); clf show(refPath); hold on axis equal plot(trajGlobalRelaxed.Trajectory(:,1),trajGlobalRelaxed.Trajectory(:,2),'g'); hold off
Arguments d'entrée
Arguments de sortie
Capacités étendues
Historique des versions
Introduit dans R2020b