global2frenet
Convertir les états globaux en états Frenet
Syntaxe
Description
frenetState = global2frenet(refPath,globalState)
[___, renvoie latTimeDerivatives] = global2frenet(refPath,globalState)latTimeDerivatives contenant les dérivées du premier et du second ordre de l'écart latéral par rapport au temps et un indicateur indiquant si le cap doit être inversé lors de la conversion en coordonnées globales.
[___] = global2frenet( accepte un vecteur de longueurs d'arc, refPath,globalState,sFrame)sFrame sur lequel le cadre Frenet doit être centré.
Exemples
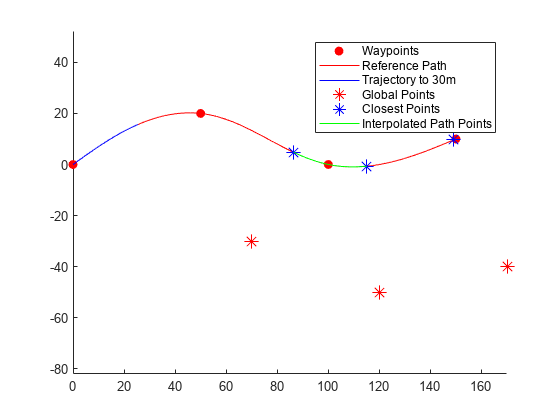
Générez un chemin de référence à partir d'un ensemble de waypoints.
waypoints = [0 0; 50 20; 100 0; 150 10]; refPath = referencePathFrenet(waypoints);
Créez un objet trajectoryGeneratorFrenet à partir du chemin de référence.
connector = trajectoryGeneratorFrenet(refPath);
Générez une trajectoire de cinq secondes entre l'origine du chemin et un point situé à 30 mètres du chemin, comme l'indique Frenet.
initCartState = refPath.SegmentParameters(1,:); initFrenetState = global2frenet(refPath,initCartState); termFrenetState = initFrenetState + [30 zeros(1,5)]; frenetTraj = connect(connector,initFrenetState,termFrenetState,5);
Convertissez la trajectoire en états globaux.
globalTraj = frenet2global(refPath,frenetTraj.Trajectory);
Afficher le chemin de référence et la trajectoire.
show(refPath); axis equal hold on plot(globalTraj(:,1),globalTraj(:,2),'b')
Spécifiez les points globaux et recherchez les points les plus proches sur le chemin de référence.
globalPoints = waypoints(2:end,:) + [20 -50]; nearestPathPoint = closestPoint(refPath,globalPoints);
Affichez les points globaux et les points les plus proches sur le chemin de référence.
plot(globalPoints(:,1),globalPoints(:,2),'r*','MarkerSize',10) plot(nearestPathPoint(:,1),nearestPathPoint(:,2),'b*','MarkerSize',10)
Interpolez entre les longueurs d’arc des deux premiers points les plus proches le long du chemin de référence.
arclengths = linspace(nearestPathPoint(1,6),nearestPathPoint(2,6),10); pathStates = interpolate(refPath,arclengths);
Affichez les points de chemin interpolés.
plot(pathStates(:,1),pathStates(:,2),'g') legend(["Waypoints","Reference Path","Trajectory to 30m",... "Global Points","Closest Points","Interpolated Path Points"])
Arguments d'entrée
Arguments de sortie
En savoir plus
La fonction objet
global2frenettrouve un point[x y]ple long du chemin le plus proche de la coordonnée xy de l'état global[x y theta kappa speed accel]g. Puisque le chemin de référence est C1 continu (tangentiellement continu), la distance sera la plus courte, où[x y]g-[x y]pest orthogonal à la tangente du chemin.où:
x y et theta –– État SE(2) exprimé en coordonnées globales, avec x et y en mètres et theta en radians.
kappa –– Courbure, ou inverse du rayon, en
m-1.speed –– Vitesse dans la direction theta dans
m/s.accel –– Accélération dans le sens theta dans
m/s2.
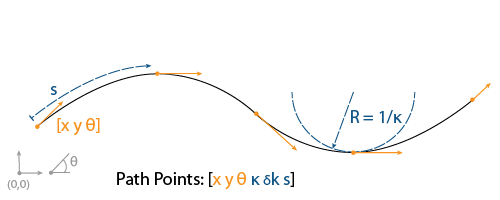
La fonction évalue ensuite l'état complet du chemin
[x y theta kappa dkappa s]p. Cela équivaut à un référentiel mobile situé à[x y]pdont l'axe longitudinal pointe le long dethetapet l'axe latéral coupe[x y]g(droite- règle de la main). Le mouvement instantané de ce référentiel est décrit par[kappa dkappa]p.où:
x y et theta — État SE(2) exprimé en coordonnées globales, avec x et y en mètres et theta en radians.
kappa — Courbure, ou inverse du rayon, en
m-1.dkappa — Dérivée de la courbure par rapport à la longueur de l'arc dans
m-2.s — Longueur de l'arc ou distance le long du chemin depuis l'origine du chemin, en mètres.
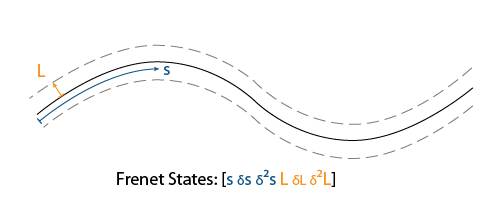
Les composantes de vitesse et d'accélération de l'état global agissent le long de la tangente définie par
thetag, qui elle-même évolue en fonction dekappag. La fonction mappe ensuite la position globale, la vitesse et l'accélération au cadre Frenet local et renvoie l'état Frenet,[s ds dds L dL ddL]f.où:
s — Longueur de l'arc ou distance le long du chemin depuis l'origine du chemin, en mètres.
L — Écart perpendiculaire à la direction du chemin de référence, en mètres.
ds et dds — Dérivés de s par rapport au temps.
dL et ddL — Dérivés de L par rapport à la longueur de l'arc, s.
Le processus pour la fonction
frenet2globalest l'inverse de la fonctionglobal2frenet.La fonction
frenet2globalévalue le chemin à la longueur de l'arc de l'état de Frenet,sf=sp, renvoyant[x y theta kappa dkappa s]p.Ce point définit à nouveau un référentiel dont les axes et le mouvement peuvent être utilisés pour projeter les écarts latéraux ou longitudinaux et leurs dérivées du premier et du second ordre dans le référentiel global.
Capacités étendues
Historique des versions
Introduit dans R2020b