closestPoint
Trouver le point le plus proche sur le chemin de référence jusqu'au point global
Syntaxe
Description
pathPoints = closestPoint(refPath,points)points.
[ renvoie éventuellement un vecteur logique pathPoints,inWindow] = closestPoint(refPath,points)inWindow, spécifiant si chaque point de la coordonnée xy correspondante dans points est projeté dans la fenêtre de recherche.
[_] = closestPoint( accepte éventuellement un vecteur ligne non décroissant refPath,points,searchWindow)searchWindow, qui définit l'intervalle du chemin à utiliser pour trouver les points les plus proches.
Exemples
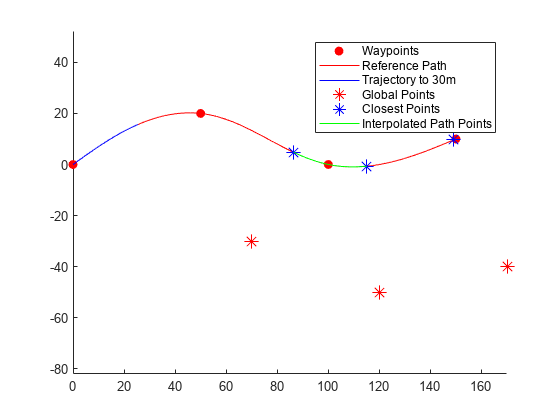
Générez un chemin de référence à partir d'un ensemble de waypoints.
waypoints = [0 0; 50 20; 100 0; 150 10]; refPath = referencePathFrenet(waypoints);
Créez un objet trajectoryGeneratorFrenet à partir du chemin de référence.
connector = trajectoryGeneratorFrenet(refPath);
Générez une trajectoire de cinq secondes entre l'origine du chemin et un point situé à 30 mètres du chemin, comme l'indique Frenet.
initCartState = refPath.SegmentParameters(1,:); initFrenetState = global2frenet(refPath,initCartState); termFrenetState = initFrenetState + [30 zeros(1,5)]; frenetTraj = connect(connector,initFrenetState,termFrenetState,5);
Convertissez la trajectoire en états globaux.
globalTraj = frenet2global(refPath,frenetTraj.Trajectory);
Afficher le chemin de référence et la trajectoire.
show(refPath); axis equal hold on plot(globalTraj(:,1),globalTraj(:,2),'b')
Spécifiez les points globaux et recherchez les points les plus proches sur le chemin de référence.
globalPoints = waypoints(2:end,:) + [20 -50]; nearestPathPoint = closestPoint(refPath,globalPoints);
Affichez les points globaux et les points les plus proches sur le chemin de référence.
plot(globalPoints(:,1),globalPoints(:,2),'r*','MarkerSize',10) plot(nearestPathPoint(:,1),nearestPathPoint(:,2),'b*','MarkerSize',10)
Interpolez entre les longueurs d’arc des deux premiers points les plus proches le long du chemin de référence.
arclengths = linspace(nearestPathPoint(1,6),nearestPathPoint(2,6),10); pathStates = interpolate(refPath,arclengths);
Affichez les points de chemin interpolés.
plot(pathStates(:,1),pathStates(:,2),'g') legend(["Waypoints","Reference Path","Trajectory to 30m",... "Global Points","Closest Points","Interpolated Path Points"])
Créez un chemin de référence auto-entrecroisé.
refPath = referencePathFrenet([0 100 -pi/4; ... 50 50 -pi/4;... 75 50 pi/2; ... 50 50 -3*pi/4; ... 0 0 -3*pi/4]);
Afficher le chemin de référence.
figure show(refPath); title("Closest Points Around Intersection") xlim([0 125]) ylim([0 125]) hold on

Trouvez la longueur de l'arc à laquelle l'intersection se produit.
sIntersection = refPath.SegmentParameters(2,end);
Générez les états de Frenet situés juste avant et après l'intersection.
f0 = [sIntersection-20 5 0 10 0 0]; % [S dS ddS L Lp Lpp] f1 = [sIntersection+20 5 0 -5 0 0]; % [S dS ddS L Lp Lpp]
Calculez le temps nécessaire pour voyager à vitesse longitudinale constante.
T = (f1(1)-f0(1))/f1(2);
Créez un générateur de trajectoire en utilisant le chemin de référence.
generator = trajectoryGeneratorFrenet(refPath);
Générez une trajectoire entre les points.
[fTraj,gTraj] = connect(generator,f0,f1,T); pts = gTraj.Trajectory;
Définissez les fonctions d'assistance au tracé.
mergeFcn = @(v1,v2)reshape([v1 v2 nan(size(v1,1),size(v2,2))]',[],1);
plotFcn = @(L1,L2,linespec)plot(mergeFcn(L1(:,1),L2(:,1:min(1,size(L2,2)))),mergeFcn(L1(:,2),L2(:,2:min(2,size(L2,2)))),linespec{:});
plotInterval = @(bounds,nPt,linespec)plotFcn(interpolate(refPath,linspace(bounds(1),bounds(2),nPt)'),[],linespec);Tracez la trajectoire.
plotFcn(pts,[],{"k.-"});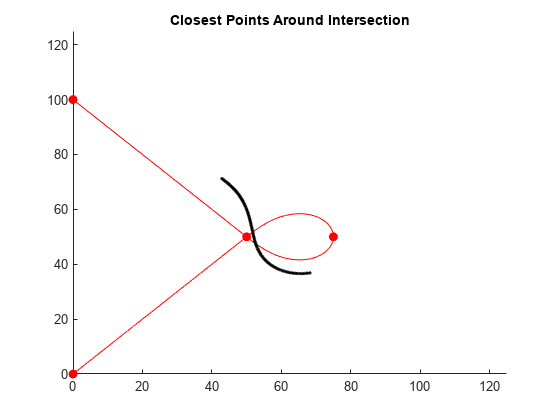
Calculez le point le plus proche sur le chemin de chaque état global.
closestPts = closestPoint(refPath,pts);
Tracez les vecteurs de points les plus proches.
plotFcn(pts,closestPts,{"b"});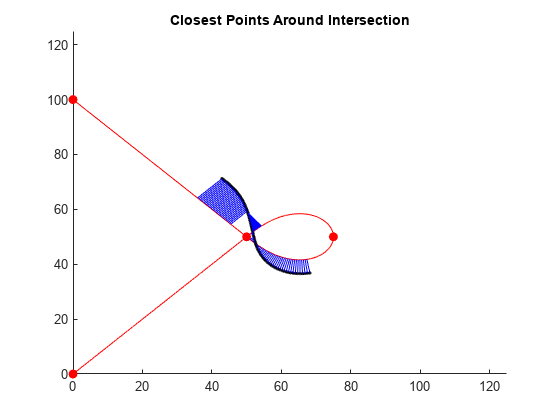
Définissez une fenêtre dans laquelle rechercher les points les plus proches.
buffWindow = [f0(1)-5 f1(1)+5];
plotInterval(buffWindow,100,{"Color",[.5 .5 .5],"LineWidth",5});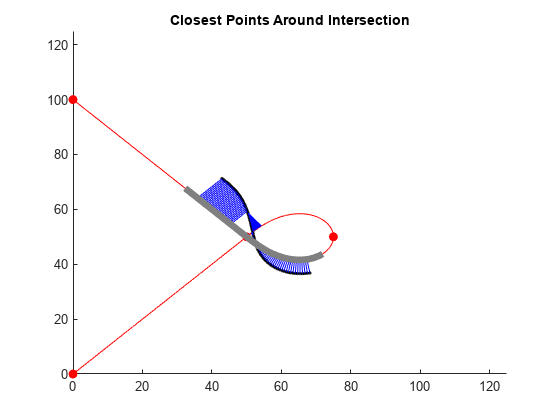
Trouvez les points les plus proches dans la fenêtre.
closestPtsInWindow = closestPoint(refPath,pts,buffWindow);
Afficher les résultats fenêtrés.
plotFcn(pts,closestPtsInWindow,{"g","LineWidth",3});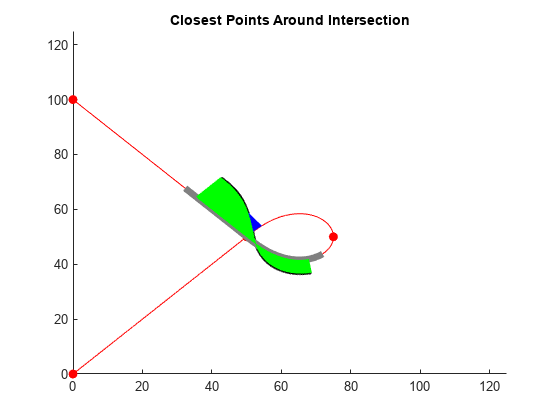
Trouvez les points les plus proches en utilisant une fenêtre trop petite.
smallWindow = [f0(1)+5 f1(1)-5]; [closestPtsSmall,inWindow] = closestPoint(refPath,pts,smallWindow);
Superposez les résultats d’une petite fenêtre.
plotInterval(smallWindow,100,{"m","LineWidth",3});
plotFcn(pts(inWindow,:),closestPtsSmall(inWindow,:),{"Color",[.5 1 .5]});
plotFcn(pts(~inWindow,:),closestPtsSmall(~inWindow,:),{"r"});
legend({"Waypoints","ReferencePath","Trajectory","ClosestPoints",...
"BuffWindow","ClosestInsideBuffWindow","SmallWindow",...
"ClosestInsideSmallWindow","ClosestOutsideSmallWindow"});
Arguments d'entrée
Arguments de sortie
Capacités étendues
Historique des versions
Introduit dans R2020b