closestProjections
Find orthogonal projections between path tangent vector and query point
Since R2022a
Syntax
Description
[
attempts to project each xy point in the points
matrix, onto each clothoid segment contained in the reference path,
arclengths,distances] = closestProjections(refPath,points)refPath, such that the projection vector is orthogonal to the path
tangent-angle. Returns closest orthogonal projection between the curve and query point in
each segment as a pair of two cell arrays, arclengths and
distances containing the arclengths and distances
respectively.
[___,
optionally returns the projected points, projPoints] = closestProjections(refPath,points)projPoints as a cell array
containing path data evaluated at the corresponding arclengths element.
Examples
Create a reference path with multiple intersections.
leftSideAngles = [linspace(-pi/6,pi/6,4) linspace(pi/6,-pi/6,4)]';
rightSideAngles = [linspace(-pi/6,pi/6,4) linspace(-pi/6,pi/6,4)]';
waypoints = zeros(numel(leftSideAngles)*2,3);
width = 10;
height = 20;
waypoints(1:2:end,:) = [zeros(numel(leftSideAngles),1) linspace(0,height,numel(leftSideAngles))' leftSideAngles]; ...
waypoints(2:2:end,:) = [width*ones(numel(leftSideAngles),1) linspace(0,height,numel(leftSideAngles))' rightSideAngles];
refPath = referencePathFrenet(waypoints);Create a set of random XY points around the path.
queryPoints = [width height]/2+(rand(10,2)-.5).*[width height]*1.5;
Retrieve the nearest valid projection of each query point on each segment in the path.
[allArclenth,allDistance,allProjection] = closestProjections(refPath,queryPoints); pLength = refPath.PathLength; breaks = [refPath.SegmentParameters(:,end); pLength]; allInterval = [breaks(1:end) [breaks(2:end); pLength]];
Return the three best projections.
maxResult = 3; [best3Arclength,best3Distance,best3Projection] = closestProjections(refPath,queryPoints,maxResult);
Define a custom set of arclength-intervals.
everyThreeMerged = [breaks(1:3:end-1) [breaks(4:3:end-1); breaks(end)]];
Find the best projection of each query-point onto each custom interval that exists.
[allArclengthCustom,allDistanceCustom,allProjectionCustom] = closestProjections(refPath,queryPoints,everyThreeMerged);
Return the single best projection in the first and last quarter of the path.
endQuarterIntervals = [0 1/4; 3/4 1]*refPath.PathLength; [bestQuarterArclength,bestQuarterDistance,bestQuarterProjection] = closestProjections(refPath,queryPoints,endQuarterIntervals, 1);
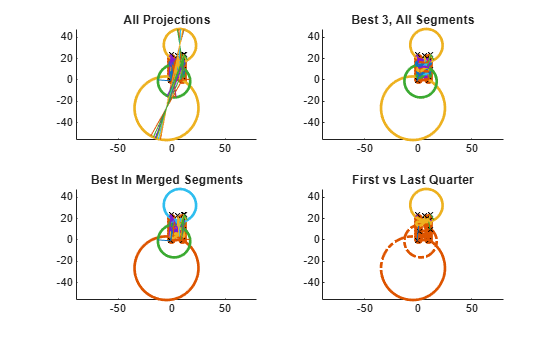
Display the results.
% Pack iterable containers intervalSets = {allInterval, allInterval, everyThreeMerged, endQuarterIntervals}; S = {allArclenth best3Arclength allArclengthCustom bestQuarterArclength}; D = {allDistance best3Distance allDistanceCustom bestQuarterDistance}; PP = {allProjection best3Projection allProjectionCustom bestQuarterProjection}; titles = ["All Projections","Best 3, All Segments","Best In Merged Segments","First vs Last Quarter"]; cOrder = colororder;
Define the helper functions.
mergeFcn = @(v1,v2)reshape([v1 v2 nan(size(v1,1),size(v2,2))]',[],1);
plotFcn = @(L1,L2,linespec)plot(mergeFcn(L1(:,1),L2(:,1:min(1,size(L2,2)))),mergeFcn(L1(:,2),L2(:,2:min(2,size(L2,2)))),linespec{:});
intervalPlotter = @(bounds,nPt,linespec)plotFcn(interpolate(refPath,linspace(bounds(1),bounds(2),nPt)'),[],linespec);Create in-loop handles.
setupFcns = {};
setupFcns{1} = @(figIdx)hold(show(refPath,"Parent",subplot(2,2,figIdx)),"on");
setupFcns{2} = @(figIdx)axis(subplot(2,2,figIdx),"equal");
setupFcns{3} = @(figIdx)title(subplot(2,2,figIdx),titles(figIdx));
setupFcns{4} = @(figIdx)plotFcn(queryPoints,[],{"Xk","MarkerSize",5});
setupFcns{5} = @(figIdx)arrayfun(@(i)intervalPlotter(intervalSets{figIdx}(i,:),100,{"Color",cOrder(mod(i,size(cOrder,1)-1)+1,:),"LineWidth",2'}),1:size(intervalSets{figIdx},1));
setupFcns{6} = @(figIdx)cellfun(@(p,projPts)plotFcn(repmat(queryPoints(p,:),size(projPts,1),1),projPts,{"Color",cOrder(mod(p,size(cOrder,1)-1)+1,:)}),num2cell(1:size(queryPoints,1))',PP{figIdx});Display the results.
arrayfun(@(idx)cellfun(@(f)f(idx),setupFcns),1:4)
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2022a