closestPointsToSequence
Syntaxe
Description
pathPoints = closestPointsToSequence(refPath,points,initWindow)points, pour être dans la fenêtre de recherche valide, initWindow. Pour chaque point de Points, la fenêtre de recherche est centrée sur le point précédent.
[ renvoie éventuellement un vecteur logique pathPoints,inWindow] = closestPointsToSequence(refPath,points,initWindow)inWindow, spécifiant si chaque point de la coordonnée xy correspondante dans points est projeté dans la fenêtre de recherche.
Exemples
[refPath,generator,f0,f1] = closestPointExampleSetup;
Définissez les fonctions d'assistance au tracé.
mergeFcn = @(v1,v2)reshape([v1 v2 nan(size(v1,1),size(v2,2))]',[],1); plotFcn = @(L1,L2,linespec)plot(mergeFcn(L1(:,1),L2(:,1:min(1,size(L2,2)))), ... mergeFcn(L1(:,2),L2(:,2:min(2,size(L2,2)))),linespec{:}); plotInterval = @(bounds,nPt,linespec)plotFcn(interpolate(... refPath,linspace(bounds(1),bounds(2),nPt)'),[],linespec);
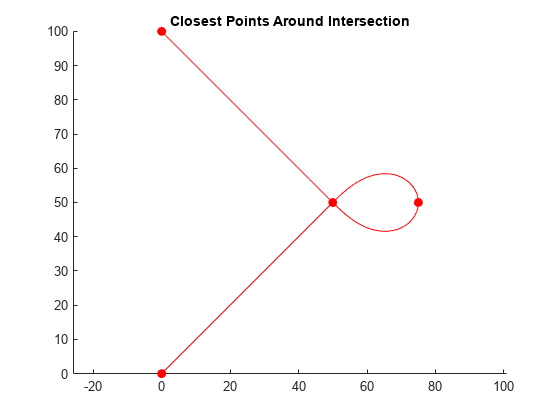
Générez une trajectoire qui contient elle-même une intersection.
f2 = f1; f2(1) = refPath.SegmentParameters(4,end) + 20;
Définissez les états de telle sorte qu'ils commencent au repos et se terminent avec une vitesse positive et aucune accélération.
f0(2) = 0; % Initial lon. speed set to 0 f2(2) = 5; % Terminal lon. speed set to 5 deltaS = (f2(1)-f0(1)); % Longitudinal distance traveled vAvgEstimate = (f2(2)-f0(2))/2; % Rough average lon. velocity estimate T2 = deltaS/vAvgEstimate; % Ballpark travel duration
Générez la trajectoire.
[fIntersecting,gIntersecting] = connect(generator,f0,f2,T2); gXingPts = gIntersecting.Trajectory;
Tracez la trajectoire.
figure
show(refPath);
xlim([0 125])
ylim([0 125])
hold on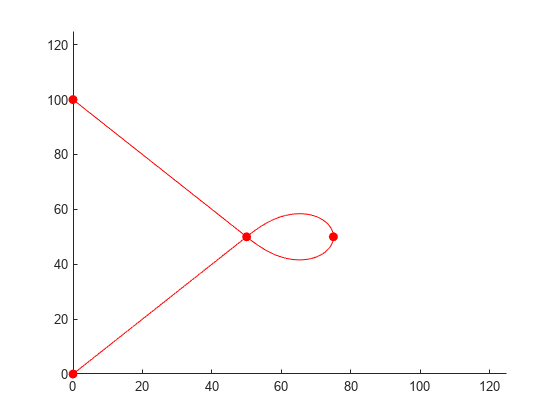
Trouvez les points les plus proches sur la trajectoire.
closestPts = closestPoint(refPath,gXingPts);
Trouvez les points les plus proches dans la fenêtre qui s'étend sur toute la longueur de la trajectoire.
windowBuffer = 5; fXingPts = fIntersecting.Trajectory; fixedWindow = [min(fXingPts(:,1))-windowBuffer max(fXingPts(:,1))+windowBuffer]; closestPtsFullWindow = closestPoint(refPath,gXingPts,fixedWindow);
Tracez ici les points naïfs les plus proches.
title("Closest Points Along Self-Intersecting Trajectory") plotInterval(fixedWindow,100,{"Color",[.5 .5 .5],"LineWidth",5});

Calculez une taille de fenêtre glissante basée sur la vitesse globale maximale. Notez que cela peut ne pas couvrir la trajectoire en fonction de la forme du chemin de référence.
dsApprox = max(abs(gXingPts(:,5)))*generator.TimeResolution; initialWindow = fXingPts(1)+[-1 1]*dsApprox; [closestPtsSlidingWindow, inWindow] = closestPointsToSequence(refPath,gXingPts,initialWindow);
Calculez la région balayée par la fenêtre glissante. Tracez ensuite la région balayée.
sweptRegion = [closestPtsSlidingWindow(1,end)-dsApprox,closestPtsSlidingWindow(end-1,end)+dsApprox];
plotInterval(sweptRegion,100,{":","Color",[.25 .25 .25],"LineWidth",3});
finalWindow = [closestPtsSlidingWindow(end-1,end)-dsApprox,closestPtsSlidingWindow(end-1,end)+dsApprox];
plotInterval(finalWindow,100,{"k","LineWidth",5});
Afficher les résultats.
plotFcn(gXingPts,[],{"k.-"});
plotFcn(gXingPts,closestPts,{"b","LineWidth",3});
plotFcn(gXingPts,closestPtsFullWindow,{"m","LineWidth",2})
plotFcn(gXingPts(inWindow,:),closestPtsSlidingWindow(inWindow,:),{"g"});
plotFcn(gXingPts(~inWindow,:),closestPtsSlidingWindow(~inWindow,:),{"r"});
legend({"Waypoints","ReferencePath","FixedWindow", ...
"SlidingWindowSweptRegion","SlidingWindowFinalSpan", ...
"Trajectory", "ClosestPoint","ClosestInsideFixedWindow", ...
"ClosestInsideSlidingWindow"});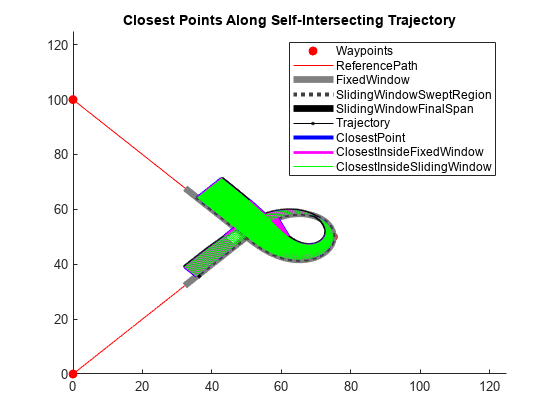
Arguments d'entrée
Arguments de sortie
Capacités étendues
Historique des versions
Introduit dans R2022a