referencePathFrenet
Chemin de référence fluide adapté aux waypoints
Description
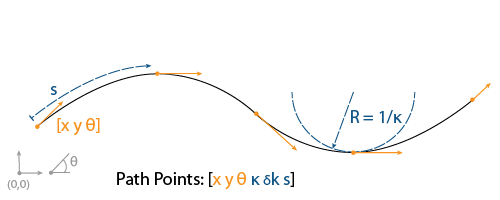
L'objet referencePathFrenet adapte une courbe lisse, par morceaux et continue à un ensemble de points de cheminement donnés comme [x y] ou [x y theta]. Après ajustement des points le long de la courbe, les points du chemin sont exprimés sous la forme [x y theta kappa dkappa s], où :
x y et theta— État SE(2) exprimé en coordonnées globales, avec x et y en mètres et theta en radians
kappa — Courbure, ou inverse du rayon, en
m-1dkappa — Dérivée de la courbure par rapport à la longueur de l'arc dans
m-2s — Longueur de l'arc ou distance le long du chemin depuis l'origine du chemin, en mètres
À l'aide de cet objet, convertissez les trajectoires entre les systèmes de coordonnées global et Frenet, interpolez les états le long du chemin en fonction de la longueur de l'arc et interrogez le point le plus proche sur un chemin à partir d'un état global.
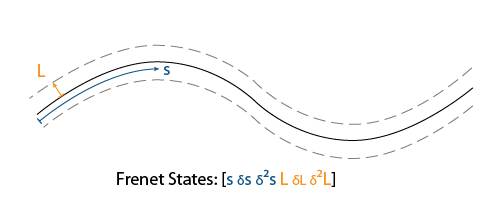
L'objet exprime les états de Frenet sous la forme d'un vecteur de forme [S dS ddS L dL ddL], où S est la longueur de l'arc et L est l'écart perpendiculaire par rapport à l'arc. direction du chemin de référence. Les dérivés de S sont relatifs au temps. Les dérivées de L sont relatives à la longueur de l'arc, S.
Création
Description
refPathObj = referencePathFrenet( adapte un ensemble continu de courbes par morceaux aux points de cheminement spécifiés. L'argument waypoints)waypoints définit la propriété Waypoints .
refPathObj = referencePathFrenet(___, définit les propriétés en utilisant un ou plusieurs arguments de paire nom-valeur en plus des arguments d'entrée dans la syntaxe précédente. Vous pouvez spécifier les propriétés DiscretizationDistance et MaxNumWaypoints comme arguments nom-valeur.Name,Value)
Propriétés
Fonctions d'objet
closestPoint | Trouver le point le plus proche sur le chemin de référence jusqu'au point global |
closestPointsToSequence | Projette une séquence de points sur le chemin |
closestProjections | Find orthogonal projections between path tangent vector and query point |
curvature | Return curvature at arclength |
changeInCurvature | Renvoie le changement de courbure à la longueur de l'arc |
frenet2global | Convert Frenet states to global states |
global2frenet | Convertir les états globaux en états Frenet |
interpolate | Interpoler le chemin de référence aux longueurs d'arc fournies |
position | Retour xy-position à la longueur de l'arc |
tangentAngle | Angle de retour de la tangente à la longueur de l'arc |
show | Afficher le chemin de référence dans la figure |
copy | Copier le chemin de référence |
Exemples
Générez des trajectoires alternatives pour un chemin de référence à l'aide des coordonnées Frenet. Spécifiez différents états initiaux et terminaux pour vos trajectoires. Ajustez vos états en fonction des trajectoires générées.
Générez un chemin de référence à partir d'un ensemble de waypoints. Créez un objet trajectoryGeneratorFrenet à partir du chemin de référence.
waypoints = [0 0; ... 50 20; ... 100 0; ... 150 10]; refPath = referencePathFrenet(waypoints); connector = trajectoryGeneratorFrenet(refPath);
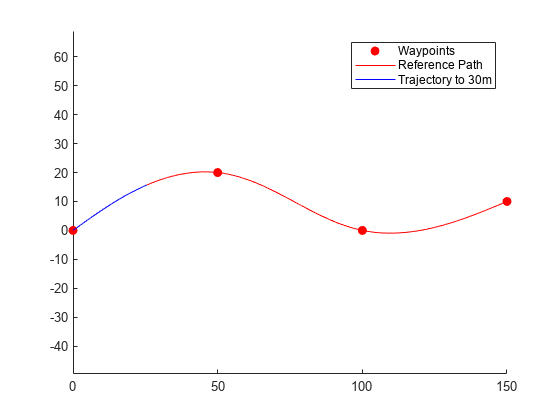
Générez une trajectoire de cinq secondes entre l'origine du chemin et un point situé à 30 m en aval du chemin, comme l'indique Frenet.
initState = [0 0 0 0 0 0]; % [S ds ddS L dL ddL] termState = [30 0 0 0 0 0]; % [S ds ddS L dL ddL] [~,trajGlobal] = connect(connector,initState,termState,5);
Afficher la trajectoire en coordonnées globales.
show(refPath); hold on axis equal plot(trajGlobal.Trajectory(:,1),trajGlobal.Trajectory(:,2),'b') legend(["Waypoints","Reference Path","Trajectory to 30m"])
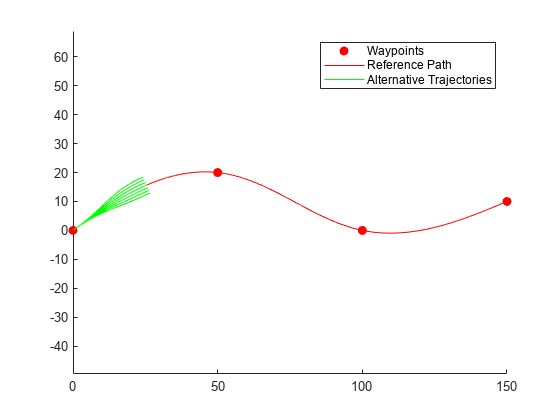
Créez une matrice d'états terminaux avec des écarts latéraux compris entre –3 m et 3 m. Générez des trajectoires qui couvrent la même longueur d'arc en 10 secondes, mais s'écartent latéralement de la trajectoire de référence. Affichez les nouveaux chemins alternatifs.
termStateDeviated = termState + ([-3:3]' * [0 0 0 1 0 0]); [~,trajGlobal] = connect(connector,initState,termStateDeviated,10); clf show(refPath); hold on axis equal for i = 1:length(trajGlobal) plot(trajGlobal(i).Trajectory(:,1),trajGlobal(i).Trajectory(:,2),'g') end legend(["Waypoints","Reference Path","Alternative Trajectories"]) hold off
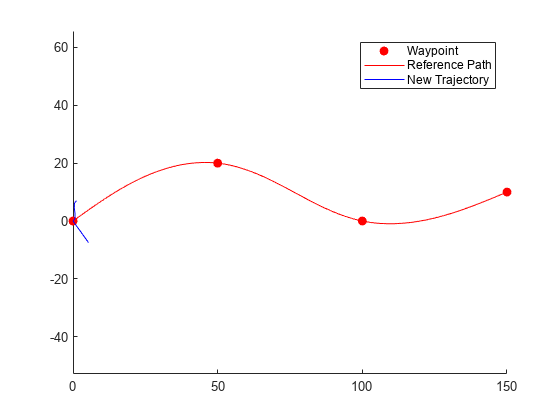
Spécifiez un nouvel état terminal pour générer une nouvelle trajectoire. Cette trajectoire n'est pas souhaitable car elle nécessite un mouvement inverse pour atteindre une vitesse longitudinale de 10 m/s.
newTermState = [5 10 0 5 0 0]; [~,newTrajGlobal] = connect(connector,initState,newTermState,3); clf show(refPath); hold on axis equal plot(newTrajGlobal.Trajectory(:,1),newTrajGlobal.Trajectory(:,2),'b'); legend(["Waypoint","Reference Path","New Trajectory"]) hold off
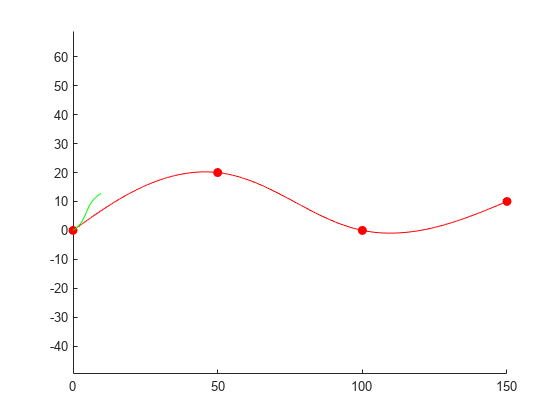
Assouplissez la restriction sur l'état longitudinal en spécifiant une longueur d'arc de NaN. Générez et affichez à nouveau la trajectoire. La nouvelle position montre une bonne trajectoire alternative qui s'écarte de la trajectoire de référence.
relaxedTermState = [NaN 10 0 5 0 0]; [~,trajGlobalRelaxed] = connect(connector,initState,relaxedTermState,3); clf show(refPath); hold on axis equal plot(trajGlobalRelaxed.Trajectory(:,1),trajGlobalRelaxed.Trajectory(:,2),'g'); hold off
En savoir plus
Références
[1] Werling, Moritz, Julius Ziegler, Sören Kammel, and Sebastian Thrun. "Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame." 2010 IEEE International Conference on Robotics and Automation. 2010, pp. 987–993.
[2] Bertolazzi, Enrico, and Marco Frego. “Fast and Accurate Clothoid Fitting.” Mathematical Methods in the Applied Sciences 38, no. 5 (March 30, 2015): 881–97. https://doi.org/10.1002/mma.3114.
Capacités étendues
Historique des versions
Introduit dans R2020b