interpolate
Interpoler le chemin de référence aux longueurs d'arc fournies
Description
pathPoints = interpolate(refPath,arclengths)
Exemples
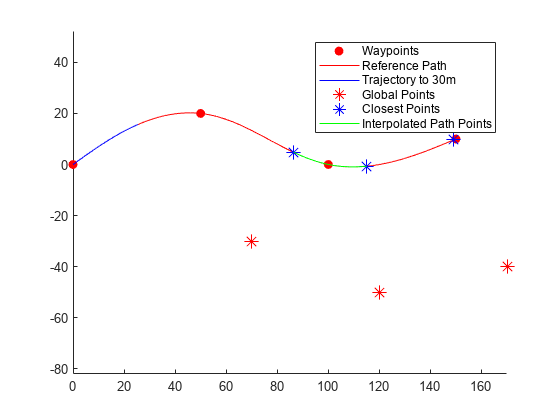
Générez un chemin de référence à partir d'un ensemble de waypoints.
waypoints = [0 0; 50 20; 100 0; 150 10]; refPath = referencePathFrenet(waypoints);
Créez un objet trajectoryGeneratorFrenet à partir du chemin de référence.
connector = trajectoryGeneratorFrenet(refPath);
Générez une trajectoire de cinq secondes entre l'origine du chemin et un point situé à 30 mètres du chemin, comme l'indique Frenet.
initCartState = refPath.SegmentParameters(1,:); initFrenetState = global2frenet(refPath,initCartState); termFrenetState = initFrenetState + [30 zeros(1,5)]; frenetTraj = connect(connector,initFrenetState,termFrenetState,5);
Convertissez la trajectoire en états globaux.
globalTraj = frenet2global(refPath,frenetTraj.Trajectory);
Afficher le chemin de référence et la trajectoire.
show(refPath); axis equal hold on plot(globalTraj(:,1),globalTraj(:,2),'b')
Spécifiez les points globaux et recherchez les points les plus proches sur le chemin de référence.
globalPoints = waypoints(2:end,:) + [20 -50]; nearestPathPoint = closestPoint(refPath,globalPoints);
Affichez les points globaux et les points les plus proches sur le chemin de référence.
plot(globalPoints(:,1),globalPoints(:,2),'r*','MarkerSize',10) plot(nearestPathPoint(:,1),nearestPathPoint(:,2),'b*','MarkerSize',10)
Interpolez entre les longueurs d’arc des deux premiers points les plus proches le long du chemin de référence.
arclengths = linspace(nearestPathPoint(1,6),nearestPathPoint(2,6),10); pathStates = interpolate(refPath,arclengths);
Affichez les points de chemin interpolés.
plot(pathStates(:,1),pathStates(:,2),'g') legend(["Waypoints","Reference Path","Trajectory to 30m",... "Global Points","Closest Points","Interpolated Path Points"])
Arguments d'entrée
Arguments de sortie
Capacités étendues
Historique des versions
Introduit dans R2020b