connect
Connecter les états Frenet initiaux et terminaux
Syntaxe
Description
frenetTrajectory = connect(connectorFrenet,initialState,terminalState,timeSpan)
[___, renvoie les trajectoires en coordonnées globales en plus de tous les arguments de la syntaxe précédente.globalTrajectory] = connect(___)
Exemples
Générez des trajectoires alternatives pour un chemin de référence à l'aide des coordonnées Frenet. Spécifiez différents états initiaux et terminaux pour vos trajectoires. Ajustez vos états en fonction des trajectoires générées.
Générez un chemin de référence à partir d'un ensemble de waypoints. Créez un objet trajectoryGeneratorFrenet à partir du chemin de référence.
waypoints = [0 0; ... 50 20; ... 100 0; ... 150 10]; refPath = referencePathFrenet(waypoints); connector = trajectoryGeneratorFrenet(refPath);
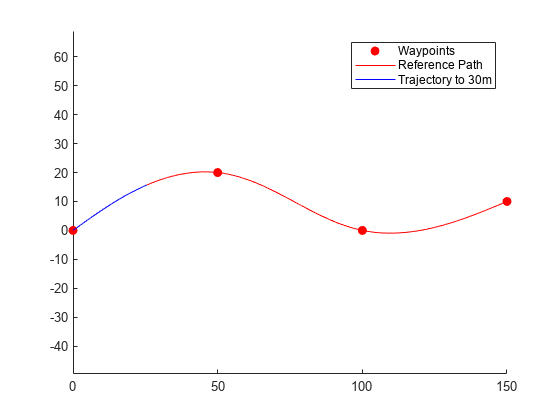
Générez une trajectoire de cinq secondes entre l'origine du chemin et un point situé à 30 m en aval du chemin, comme l'indique Frenet.
initState = [0 0 0 0 0 0]; % [S ds ddS L dL ddL] termState = [30 0 0 0 0 0]; % [S ds ddS L dL ddL] [~,trajGlobal] = connect(connector,initState,termState,5);
Afficher la trajectoire en coordonnées globales.
show(refPath); hold on axis equal plot(trajGlobal.Trajectory(:,1),trajGlobal.Trajectory(:,2),'b') legend(["Waypoints","Reference Path","Trajectory to 30m"])
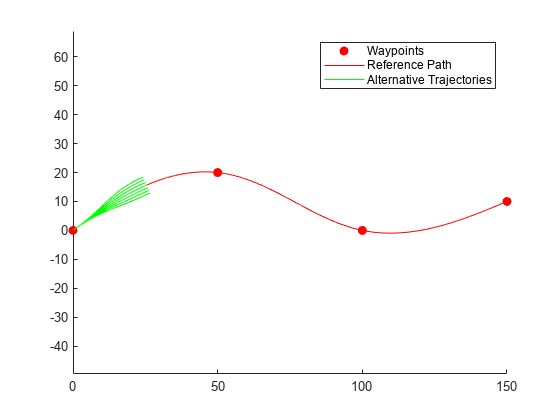
Créez une matrice d'états terminaux avec des écarts latéraux compris entre –3 m et 3 m. Générez des trajectoires qui couvrent la même longueur d'arc en 10 secondes, mais s'écartent latéralement de la trajectoire de référence. Affichez les nouveaux chemins alternatifs.
termStateDeviated = termState + ([-3:3]' * [0 0 0 1 0 0]); [~,trajGlobal] = connect(connector,initState,termStateDeviated,10); clf show(refPath); hold on axis equal for i = 1:length(trajGlobal) plot(trajGlobal(i).Trajectory(:,1),trajGlobal(i).Trajectory(:,2),'g') end legend(["Waypoints","Reference Path","Alternative Trajectories"]) hold off
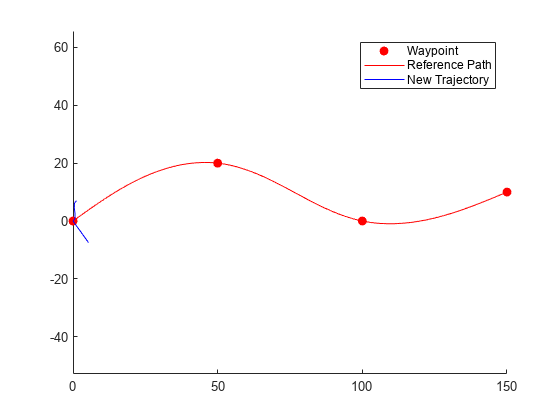
Spécifiez un nouvel état terminal pour générer une nouvelle trajectoire. Cette trajectoire n'est pas souhaitable car elle nécessite un mouvement inverse pour atteindre une vitesse longitudinale de 10 m/s.
newTermState = [5 10 0 5 0 0]; [~,newTrajGlobal] = connect(connector,initState,newTermState,3); clf show(refPath); hold on axis equal plot(newTrajGlobal.Trajectory(:,1),newTrajGlobal.Trajectory(:,2),'b'); legend(["Waypoint","Reference Path","New Trajectory"]) hold off
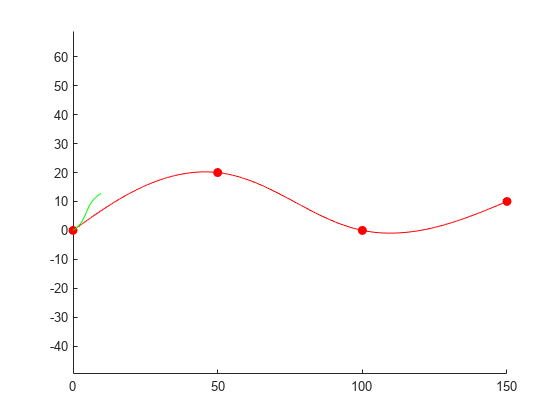
Assouplissez la restriction sur l'état longitudinal en spécifiant une longueur d'arc de NaN. Générez et affichez à nouveau la trajectoire. La nouvelle position montre une bonne trajectoire alternative qui s'écarte de la trajectoire de référence.
relaxedTermState = [NaN 10 0 5 0 0]; [~,trajGlobalRelaxed] = connect(connector,initState,relaxedTermState,3); clf show(refPath); hold on axis equal plot(trajGlobalRelaxed.Trajectory(:,1),trajGlobalRelaxed.Trajectory(:,2),'g'); hold off
Arguments d'entrée
Arguments de sortie
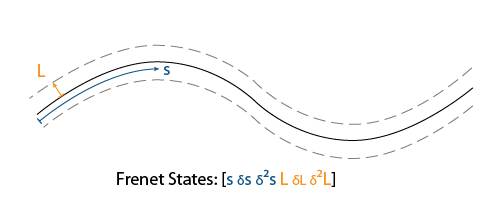
Trajectoires Frenet entre tous les états initial et final, renvoyées sous forme de tableau de structure avec ces champs :
Trajectory— n-matrice numérique par 6. Chaque ligne de la matrice est un ensemble de coordonnées Frenet de l'état initial d'une trajectoire sous la forme[S dS ddS L dL ddL].Time— Vecteur de scalaires positifs de0àtimeSpanen secondes.
Cette fonction prend en charge 1-to- n, n-to-1 ou n-to- n connexions de trajectoire par paire basées sur le nombre de lignes de initialState et terminalState.
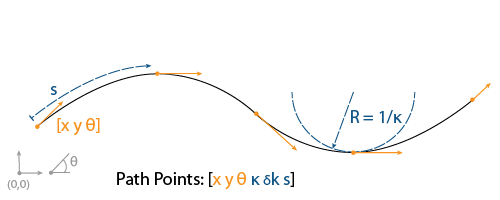
Trajectoires globales entre tous les états initial et final, renvoyées sous forme de structure ou de tableau de structures avec des champs :
Trajectory— n-matrice numérique par 6. Chaque ligne de la matrice est un ensemble d'états globaux de la forme[x y theta kappa v a].Time— Vecteur de scalaires positifs de0àtimeSpanen secondes.
Cette fonction prend en charge 1-to- n, n-to-1 ou n-to- n connexions de trajectoire par paire basées sur le nombre de lignes de initialState et terminalState.
Capacités étendues
Historique des versions
Introduit dans R2020b