factorPoseSE3AndPointXYZ
Facteur reliant la position SE (3) et le point 3D
Depuis R2022b
Description
L'objet factorPoseSE3AndPointXYZ contient des facteurs qui décrivent chacun la relation entre une position dans l'espace d'état SE(3) et un point de repère 3D. Vous pouvez utiliser cet objet pour ajouter un ou plusieurs facteurs à un objet factorGraph .
Création
Description
F = factorPoseSE3AndPointXYZ(nodeID)factorPoseSE3AndPointXYZ , F, avec la propriété des numéros d'identification de nœud, NodeID, définie à nodeID.
F = factorPoseSE3AndPointXYZ(___,Name=Value)factorPoseSE3AndPointXYZ([1 2],Measurement=[1 2 3]) définit la propriété Measurement de l'objet factorPoseSE3AndPointXYZ sur [1 2 3].
Propriétés
Fonctions d'objet
nodeType | Obtenir le type de nœud dans le graphique de facteurs |
Exemples
Créez une matrice de positions des points de repère à utiliser pour la localisation et des poses réelles du robot avec lesquelles comparer votre estimation du graphique factoriel. Utilisez la fonction d'assistance exampleHelperPlotPositionsAndLandmarks pour visualiser les points de repère et le chemin réel du robot.
gndtruth = [0 0 0;
2 0 pi/2;
2 2 pi;
0 2 pi];
landmarks = [3 0; 0 3];
exampleHelperPlotPositionsAndLandmarks(gndtruth,landmarks)
Utilisez la fonction d'assistance exampleHelperSimpleFourPoseGraph pour créer un graphique de facteurs contenant quatre poses liées par trois facteurs 2D à deux poses. Pour plus de détails, voir la page objet factorTwoPoseSE2 .
fg = exampleHelperSimpleFourPoseGraph(gndtruth);
Créer des facteurs marquants
Générez des ID de nœud pour créer deux ID de nœud pour deux points de repère. Les deuxième et troisième nœuds de pose observent le premier point de repère et doivent donc se connecter à ce point de repère avec un facteur. Les troisième et quatrième nœuds de pose observent le deuxième point de repère.
lmIDs = generateNodeID(fg,2); lmFIDs = [1 lmIDs(1); % Pose Node 1 <-> Landmark 1 2 lmIDs(1); % Pose Node 2 <-> Landmark 1 2 lmIDs(2); % Pose Node 2 <-> Landmark 2 3 lmIDs(2)]; % Pose Node 3 <-> Landmark 2
Définir les mesures de position relative entre la position des poses et leurs repères dans le référentiel du nœud de pose. Ajoutez ensuite du bruit.
lmFMeasure = [0 -1; % Landmark 1 in pose node 1 reference frame -1 2; % Landmark 1 in pose node 2 reference frame 2 -1; % Landmark 2 in pose node 2 reference frame 0 -1]; % Landmark 2 in pose node 3 reference frame lmFMeasure = lmFMeasure + 0.1*rand(4,2);
Créez les facteurs de repère avec ces mesures relatives et ajoutez-les au graphique des facteurs.
lmFactor = factorPoseSE2AndPointXY(lmFIDs,Measurement=lmFMeasure); addFactor(fg,lmFactor);
Définissez l'état initial des nœuds de points de repère sur la position réelle des points de repère avec un peu de bruit.
nodeState(fg,lmIDs,landmarks+0.1*rand(2));
Optimiser le graphique des facteurs
Optimisez le graphique factoriel avec les options du solveur par défaut. L'optimisation met à jour les états de tous les nœuds dans le graphique de facteurs, donc les positions du véhicule et les points de repère sont mis à jour.
rng default
optimize(fg)ans = struct with fields:
InitialCost: 0.0538
FinalCost: 6.2053e-04
NumSuccessfulSteps: 4
NumUnsuccessfulSteps: 0
TotalTime: 3.1304e-04
TerminationType: 0
IsSolutionUsable: 1
OptimizedNodeIDs: [1 2 3 4 5]
FixedNodeIDs: 0
Visualisez et comparez les résultats
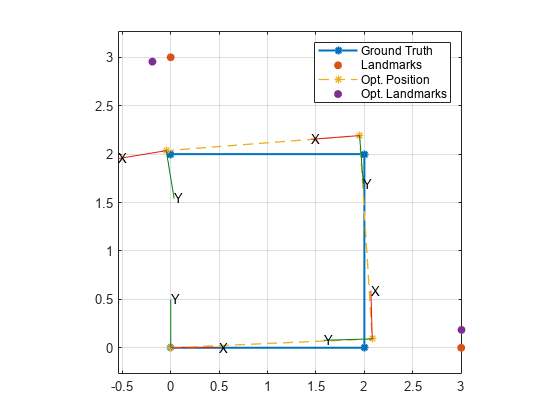
Obtenez et stockez les états de nœuds mis à jour pour le robot et les points de repère. Tracez ensuite les résultats, en comparant l'estimation du graphique factoriel de la trajectoire du robot à la vérité terrain connue du robot.
poseIDs = nodeIDs(fg,NodeType="POSE_SE2")poseIDs = 1×4
0 1 2 3
poseStatesOpt = nodeState(fg,poseIDs)
poseStatesOpt = 4×3
0 0 0
2.0815 0.0913 1.5986
1.9509 2.1910 -3.0651
-0.0457 2.0354 -2.9792
landmarkStatesOpt = nodeState(fg,lmIDs)
landmarkStatesOpt = 2×2
3.0031 0.1844
-0.1893 2.9547
exampleHelperPlotPositionsAndLandmarks(gndtruth,landmarks,poseStatesOpt,landmarkStatesOpt);