estimateStates
Fusion par lots et lissage des données des capteurs
Depuis R2022a
Syntaxe
Description
estimates = estimateStates(filter,sensorData,measurementNoise)sensorData et fusionne les données de chaque colonne du tableau une par une.
[ renvoie en outre les estimations d'état lissées en utilisant le lisseur de Kalman non linéaire Rach-Tung-Striebel (RTS). Pour plus de détails sur l'algorithme, voir Algorithmes et [1].estimates,smoothEstimates] = estimateStates(___)
Conseil
Le lissage nécessite généralement beaucoup plus de mémoire et de temps de calcul. Utilisez cette syntaxe uniquement lorsque vous avez besoin des états estimés lissés.
Exemples
Chargez les données de mesure d’un accéléromètre et d’un gyroscope.
load("accelGyroINSEKFData.mat");Créez un objet filtre insEKF . Spécifiez la partie orientation de l’état dans le filtre en utilisant l’orientation initiale des données de mesure. Spécifiez les éléments diagonaux de la matrice de covariance d'erreur d'estimation d'état correspondant à l'état d'orientation comme 0.01.
filt = insEKF; stateparts(filt,"Orientation",compact(initOrient)); statecovparts(filt,"Orientation",1e-2);
Spécifiez le bruit de mesure et le bruit de processus additif. Vous pouvez obtenir ces valeurs en utilisant la fonction objet tune de l'objet filtre.
measureNoise = struct("AccelerometerNoise", 0.1739, ... "GyroscopeNoise", 1.1129); processNoise = diag([ ... 2.8586 1.3718 0.8956 3.2148 4.3574 2.5411 3.2148 0.5465 0.2811 ... 1.7149 0.1739 0.7752 0.1739]); filt.AdditiveProcessNoise = processNoise;
Estimez par lots les états à l'aide de la fonction objet estimateStates . Obtenez également les estimations après lissage.
[estimates,smoothEstimates] = estimateStates(filt,sensorData,measureNoise);
Visualisez l'orientation estimée dans les angles d'Euler.
figure t = estimates.Properties.RowTimes; plot(t,eulerd(estimates.Orientation,"ZYX","frame")); title("Estimated Orientation"); ylabel("Degrees")

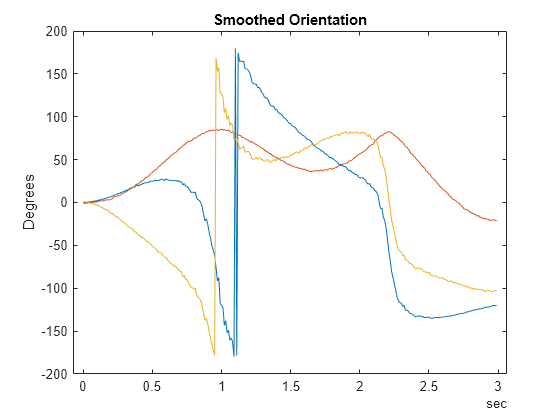
Visualisez l'orientation estimée après lissage aux angles d'Euler.
figure plot(t,eulerd(smoothEstimates.Orientation,"ZYX","frame")); title("Smoothed Orientation"); ylabel("Degrees")
Visualisez l'erreur d'estimation, en distance quaternion, en utilisant la fonction objet dist de l'objet quaternion .
trueOrient = groundTruth.Orientation; plot(t,rad2deg(dist(estimates.Orientation, trueOrient)), ... t,rad2deg(dist(smoothEstimates.Orientation, trueOrient))); title("Estimated and Smoother Error"); legend("Estimation Error","Smoothed Error") xlabel("Time"); ylabel("Degrees")

Arguments d'entrée
Arguments de sortie
Algorithmes
Références
[1] Crassidis, John L., and John L. Junkins. "Optimal Estimation of Dynamic Systems". 2nd ed, CRC Press, pp. 349- 352, 2012.
Capacités étendues
Historique des versions
Introduit dans R2022aVoir aussi
predict | fuse | residual | correct | stateparts | statecovparts | stateinfo | tune | createTunerCostTemplate | tunerCostFcnParam