tune
Ajustez les paramètres insEKF pour réduire l'erreur d'estimation
Depuis R2022a
Syntaxe
Description
tunedMeasureNoise = tune(filter,measureNoise,sensorData,groundTruth)AdditiveProcessNoise de l'objet filtre insEKF filter et le bruit de mesure, pour réduire l'erreur d'estimation de l'état quadratique moyen (RMS) entre les données du capteur fusionnées et la vérité terrain. La fonction renvoie également le bruit de mesure réglé tunedMeasureNoise. La fonction utilise les valeurs des propriétés du filtre et le bruit de mesure fourni dans la structure measureNoise comme estimation initiale pour l'algorithme d'optimisation.
tunedMeasureNoise = tune(___,config)tunerconfig config, en plus de tous les arguments d'entrée de la syntaxe précédente.
Exemples
Chargez les données de capteur enregistrées et les données de vérité terrain.
load("accelGyroINSEKFData.mat");Créez un objet filtre insEKF . Spécifiez la partie orientation de l’état dans le filtre en utilisant l’orientation initiale des données de mesure. Spécifiez les éléments diagonaux de la matrice de covariance d'erreur d'estimation d'état correspondant à l'état d'orientation comme 0.01.
filt = insEKF; stateparts(filt,"Orientation",compact(initOrient)); statecovparts(filt,"Orientation",1e-2);
Obtenez une structure de bruit de mesure représentative et utilisez-la pour estimer les états avant le réglage.
mnoise = tunernoise(filt); untunedEst = estimateStates(filt,sensorData,mnoise);
Réinitialisez le filtre, configurez un objet tunerconfig et ajustez le filtre.
stateparts(filt,"Orientation",compact(initOrient)); statecovparts(filt,"Orientation",1e-2); cfg = tunerconfig(filt,MaxIterations=10,ObjectiveLimit=1e-4); tunedmn = tune(filt,mnoise,sensorData,groundTruth,cfg);
Iteration Parameter Metric
_________ _________ ______
1 AdditiveProcessNoise(1) 0.3787
1 AdditiveProcessNoise(15) 0.3761
1 AdditiveProcessNoise(29) 0.3695
1 AdditiveProcessNoise(43) 0.3655
1 AdditiveProcessNoise(57) 0.3533
1 AdditiveProcessNoise(71) 0.3446
1 AdditiveProcessNoise(85) 0.3431
1 AdditiveProcessNoise(99) 0.3428
1 AdditiveProcessNoise(113) 0.3427
1 AdditiveProcessNoise(127) 0.3426
1 AdditiveProcessNoise(141) 0.3298
1 AdditiveProcessNoise(155) 0.3206
1 AdditiveProcessNoise(169) 0.3200
1 AccelerometerNoise 0.3199
1 GyroscopeNoise 0.3198
2 AdditiveProcessNoise(1) 0.3126
2 AdditiveProcessNoise(15) 0.3098
2 AdditiveProcessNoise(29) 0.3018
2 AdditiveProcessNoise(43) 0.2988
2 AdditiveProcessNoise(57) 0.2851
2 AdditiveProcessNoise(71) 0.2784
2 AdditiveProcessNoise(85) 0.2760
2 AdditiveProcessNoise(99) 0.2744
2 AdditiveProcessNoise(113) 0.2744
2 AdditiveProcessNoise(127) 0.2743
2 AdditiveProcessNoise(141) 0.2602
2 AdditiveProcessNoise(155) 0.2537
2 AdditiveProcessNoise(169) 0.2527
2 AccelerometerNoise 0.2524
2 GyroscopeNoise 0.2524
3 AdditiveProcessNoise(1) 0.2476
3 AdditiveProcessNoise(15) 0.2432
3 AdditiveProcessNoise(29) 0.2397
3 AdditiveProcessNoise(43) 0.2381
3 AdditiveProcessNoise(57) 0.2255
3 AdditiveProcessNoise(71) 0.2226
3 AdditiveProcessNoise(85) 0.2221
3 AdditiveProcessNoise(99) 0.2202
3 AdditiveProcessNoise(113) 0.2201
3 AdditiveProcessNoise(127) 0.2201
3 AdditiveProcessNoise(141) 0.2090
3 AdditiveProcessNoise(155) 0.2070
3 AdditiveProcessNoise(169) 0.2058
3 AccelerometerNoise 0.2052
3 GyroscopeNoise 0.2052
4 AdditiveProcessNoise(1) 0.2051
4 AdditiveProcessNoise(15) 0.2027
4 AdditiveProcessNoise(29) 0.2019
4 AdditiveProcessNoise(43) 0.2000
4 AdditiveProcessNoise(57) 0.1909
4 AdditiveProcessNoise(71) 0.1897
4 AdditiveProcessNoise(85) 0.1882
4 AdditiveProcessNoise(99) 0.1871
4 AdditiveProcessNoise(113) 0.1870
4 AdditiveProcessNoise(127) 0.1870
4 AdditiveProcessNoise(141) 0.1791
4 AdditiveProcessNoise(155) 0.1783
4 AdditiveProcessNoise(169) 0.1751
4 AccelerometerNoise 0.1748
4 GyroscopeNoise 0.1747
5 AdditiveProcessNoise(1) 0.1742
5 AdditiveProcessNoise(15) 0.1732
5 AdditiveProcessNoise(29) 0.1712
5 AdditiveProcessNoise(43) 0.1712
5 AdditiveProcessNoise(57) 0.1626
5 AdditiveProcessNoise(71) 0.1615
5 AdditiveProcessNoise(85) 0.1598
5 AdditiveProcessNoise(99) 0.1590
5 AdditiveProcessNoise(113) 0.1589
5 AdditiveProcessNoise(127) 0.1589
5 AdditiveProcessNoise(141) 0.1517
5 AdditiveProcessNoise(155) 0.1508
5 AdditiveProcessNoise(169) 0.1476
5 AccelerometerNoise 0.1473
5 GyroscopeNoise 0.1470
6 AdditiveProcessNoise(1) 0.1470
6 AdditiveProcessNoise(15) 0.1470
6 AdditiveProcessNoise(29) 0.1463
6 AdditiveProcessNoise(43) 0.1462
6 AdditiveProcessNoise(57) 0.1367
6 AdditiveProcessNoise(71) 0.1360
6 AdditiveProcessNoise(85) 0.1360
6 AdditiveProcessNoise(99) 0.1350
6 AdditiveProcessNoise(113) 0.1350
6 AdditiveProcessNoise(127) 0.1350
6 AdditiveProcessNoise(141) 0.1289
6 AdditiveProcessNoise(155) 0.1288
6 AdditiveProcessNoise(169) 0.1262
6 AccelerometerNoise 0.1253
6 GyroscopeNoise 0.1246
7 AdditiveProcessNoise(1) 0.1246
7 AdditiveProcessNoise(15) 0.1244
7 AdditiveProcessNoise(29) 0.1205
7 AdditiveProcessNoise(43) 0.1203
7 AdditiveProcessNoise(57) 0.1125
7 AdditiveProcessNoise(71) 0.1122
7 AdditiveProcessNoise(85) 0.1117
7 AdditiveProcessNoise(99) 0.1106
7 AdditiveProcessNoise(113) 0.1104
7 AdditiveProcessNoise(127) 0.1104
7 AdditiveProcessNoise(141) 0.1058
7 AdditiveProcessNoise(155) 0.1052
7 AdditiveProcessNoise(169) 0.1035
7 AccelerometerNoise 0.1024
7 GyroscopeNoise 0.1014
8 AdditiveProcessNoise(1) 0.1014
8 AdditiveProcessNoise(15) 0.1012
8 AdditiveProcessNoise(29) 0.1012
8 AdditiveProcessNoise(43) 0.1005
8 AdditiveProcessNoise(57) 0.0948
8 AdditiveProcessNoise(71) 0.0948
8 AdditiveProcessNoise(85) 0.0938
8 AdditiveProcessNoise(99) 0.0934
8 AdditiveProcessNoise(113) 0.0931
8 AdditiveProcessNoise(127) 0.0931
8 AdditiveProcessNoise(141) 0.0896
8 AdditiveProcessNoise(155) 0.0889
8 AdditiveProcessNoise(169) 0.0867
8 AccelerometerNoise 0.0859
8 GyroscopeNoise 0.0851
9 AdditiveProcessNoise(1) 0.0851
9 AdditiveProcessNoise(15) 0.0850
9 AdditiveProcessNoise(29) 0.0824
9 AdditiveProcessNoise(43) 0.0819
9 AdditiveProcessNoise(57) 0.0771
9 AdditiveProcessNoise(71) 0.0771
9 AdditiveProcessNoise(85) 0.0762
9 AdditiveProcessNoise(99) 0.0759
9 AdditiveProcessNoise(113) 0.0754
9 AdditiveProcessNoise(127) 0.0754
9 AdditiveProcessNoise(141) 0.0734
9 AdditiveProcessNoise(155) 0.0724
9 AdditiveProcessNoise(169) 0.0702
9 AccelerometerNoise 0.0697
9 GyroscopeNoise 0.0689
10 AdditiveProcessNoise(1) 0.0689
10 AdditiveProcessNoise(15) 0.0686
10 AdditiveProcessNoise(29) 0.0658
10 AdditiveProcessNoise(43) 0.0655
10 AdditiveProcessNoise(57) 0.0622
10 AdditiveProcessNoise(71) 0.0620
10 AdditiveProcessNoise(85) 0.0616
10 AdditiveProcessNoise(99) 0.0615
10 AdditiveProcessNoise(113) 0.0607
10 AdditiveProcessNoise(127) 0.0606
10 AdditiveProcessNoise(141) 0.0590
10 AdditiveProcessNoise(155) 0.0578
10 AdditiveProcessNoise(169) 0.0565
10 AccelerometerNoise 0.0562
10 GyroscopeNoise 0.0557
Estimez à nouveau les états, cette fois en utilisant le filtre optimisé.
tunedEst = estimateStates(filt,sensorData,tunedmn);
Comparez les estimations ajustées et non ajustées avec les données de vérité terrain.
times = groundTruth.Properties.RowTimes; duntuned = rad2deg(dist(untunedEst.Orientation,groundTruth.Orientation)); dtuned = rad2deg(dist(tunedEst.Orientation,groundTruth.Orientation)); plot(times,duntuned,times,dtuned); xlabel("Time (sec)") ylabel("Error (deg)") legend("Untuned","Tuned") title("Filter Orientation Error")
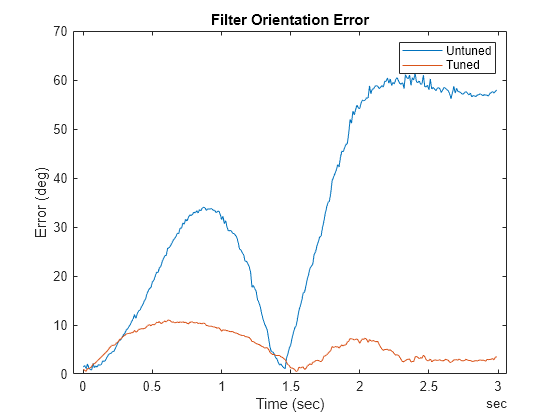
Imprimez l'erreur quadratique moyenne (RMS) des filtres non réglés et réglés.
untunedRMSError = sqrt(mean(duntuned.^2)); tunedRMSError = sqrt(mean(dtuned.^2)); fprintf("Untuned RMS error: %.2f degrees\n", ... untunedRMSError);
Untuned RMS error: 39.47 degrees
fprintf("Tuned RMS error: %.2f degrees\n", ... tunedRMSError);
Tuned RMS error: 6.39 degrees
Arguments d'entrée
Arguments de sortie
Références
[1] Abbeel, P., Coates, A., Montemerlo, M., Ng, A.Y. and Thrun, S. Discriminative Training of Kalman Filters. In Robotics: Science and systems, Vol. 2, pp. 1, 2005.
Historique des versions
Introduit dans R2022a
Voir aussi
tunerconfig | tunernoise | predict | fuse | residual | correct | stateparts | statecovparts | stateinfo | estimateStates | createTunerCostTemplate | tunerCostFcnParam