Planification du mouvement
Utilisez la planification de mouvements pour planifier un chemin à travers un environnement. Vous pouvez utiliser des planificateurs courants basés sur l'échantillonnage tels que RRT, RRT* et Hybrid A*, ou spécifier vos propres interfaces de planification de chemin personnalisables. Utilisez les métriques de chemin, l'échantillonnage de l'espace d'état et la validation d'état pour garantir que votre chemin est valide et présente un franchissement d'obstacles ou une fluidité appropriés. Suivez votre chemin et évitez les obstacles à l'aide des algorithmes de poursuite pure, d'histogramme de champ vectoriel (VFH) et de bande élastique chronométrée (TEB).
Fonctions
Blocs
| Pure Pursuit | Commandes de contrôle de vitesse linéaire et angulaire (depuis R2019b) |
| Vector Field Histogram | Évitez les obstacles à l'aide de l'histogramme de champ vectoriel (depuis R2019b) |
Concepts
- Get Started with Motion Planning Networks
Motion Planning Networks for state space sampling and path planning.
Exemples et procédures
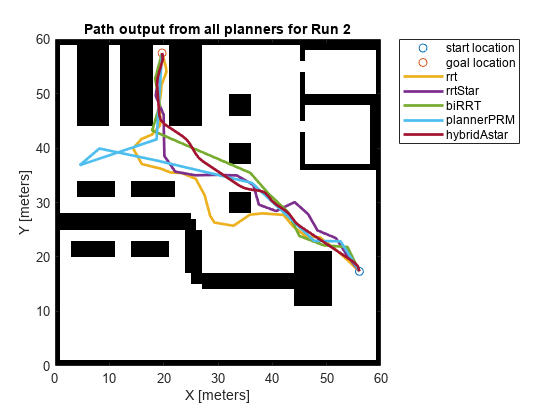
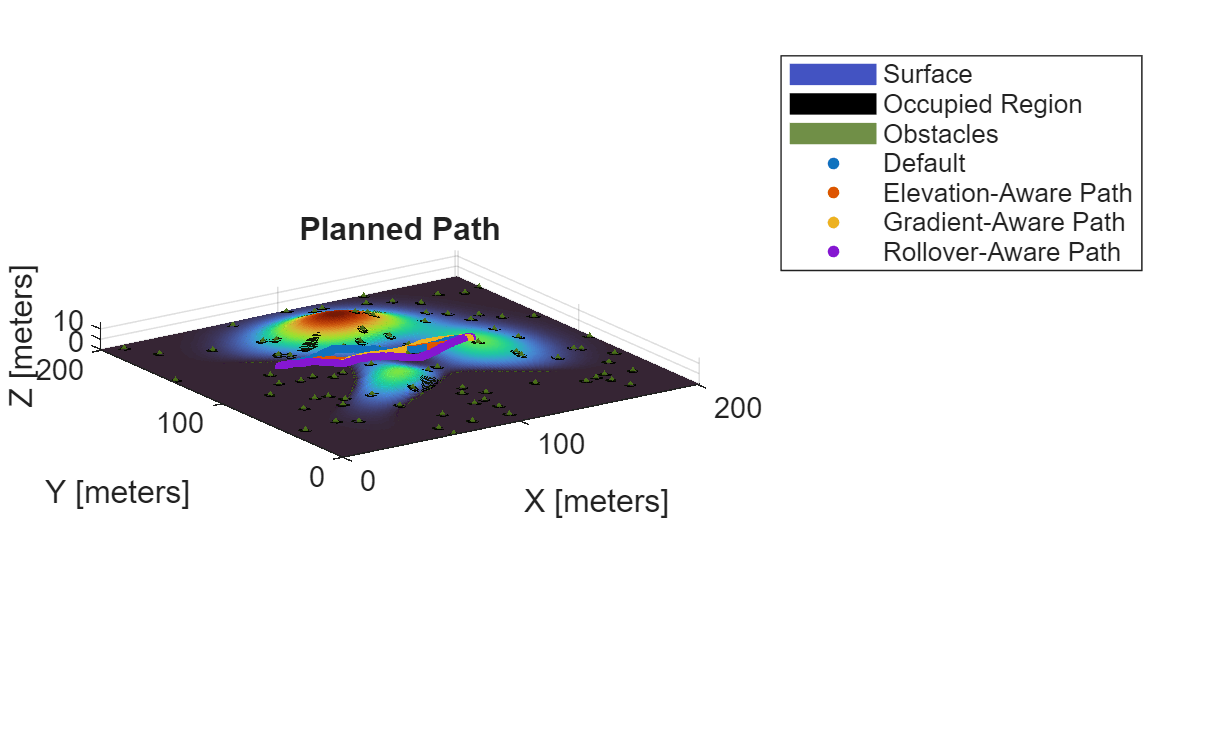
- Choose Path Planning Algorithms for Navigation
Details about the benefits of different path and motion planning algorithms.
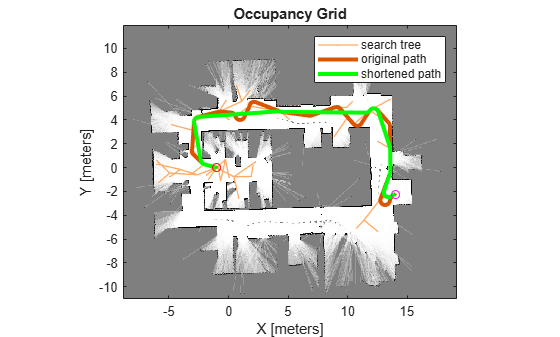
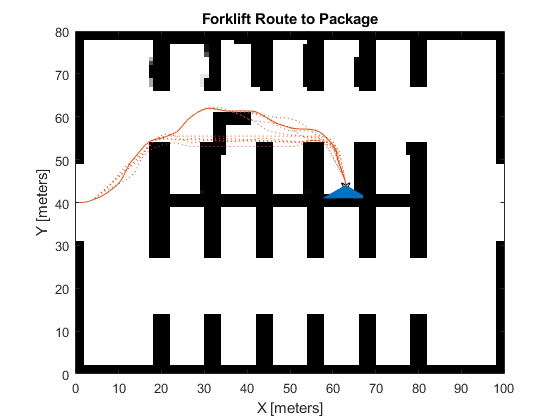
- Moving Furniture in a Cluttered Room with RRT
This example shows how to plan a path to move bulky furniture in a tight space avoiding poles.
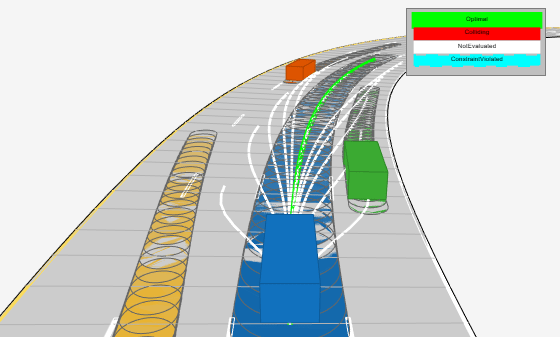
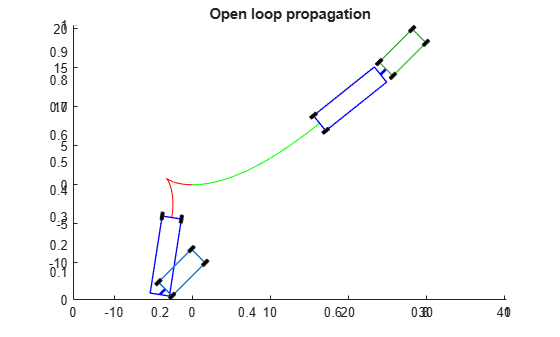
- Optimal Trajectory Generation for Urban Driving
This example shows how to perform dynamic replanning in an urban scenario using
trajectoryOptimalFrenet. - Motion Planning in Urban Environments Using Dynamic Occupancy Grid Map
This example shows you how to perform dynamic replanning in an urban driving scene using a Frenet reference path.
- Path Following with Obstacle Avoidance in Simulink®
Use Simulink to avoid obstacles while following a path for a differential drive robot.
- Obstacle Avoidance with TurtleBot and VFH
This example shows how to use ROS Toolbox and a TurtleBot® with vector field histograms (VFH) to perform obstacle avoidance when driving a robot in an environment.
- Vector Field Histogram
VFH algorithm details and tunable properties.
- Pure Pursuit Controller
Pure Pursuit Controller functionality and algorithm details.
Exemples présentés








You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)